
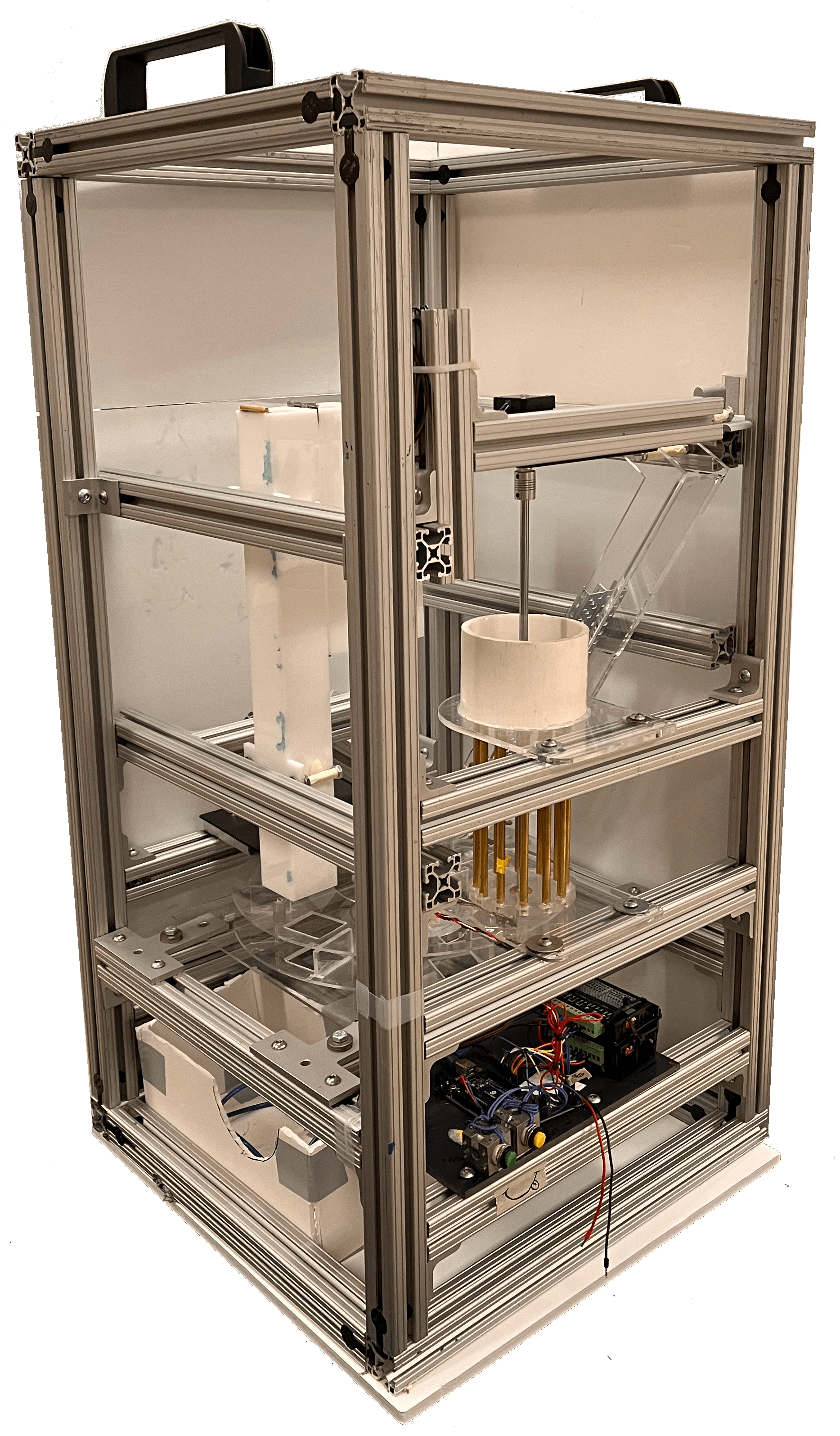





A fully functional prototype is shown below. This design serves as a prototype for the final design, with each of the subsystems to be robustly manufactured by laser cutting acrylic, 3D printing, or CNC/machining methods. Extensive design validation and verification will also follow in the spring 2023 semester. The project is set to be completed by May 2023.

For this phase of the design, I took a larger leadership role in assisting in each subsystem and especially with completing the automation and pill filling components. I created the CAD models of the pill filling subsystem to be laser cut and wrote the completed automated code to control the rotary table and pill filling systems. I assisted in the electrical wiring and circuitry as well. I iterated several of the designs to the one shown, including the passive cap placement and cap tightening subsystems. I performed design validation and failure analysis on the system as well.
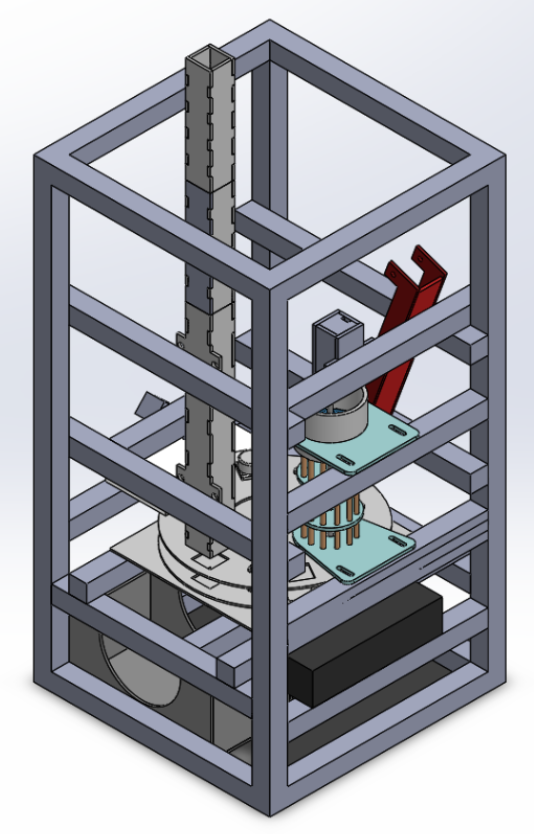
The final design was rotated to a vertical configuration as shown. The bottle transfer subsystem was iterated to be more compact, easier to store, and with higher precision control on bottle placement.
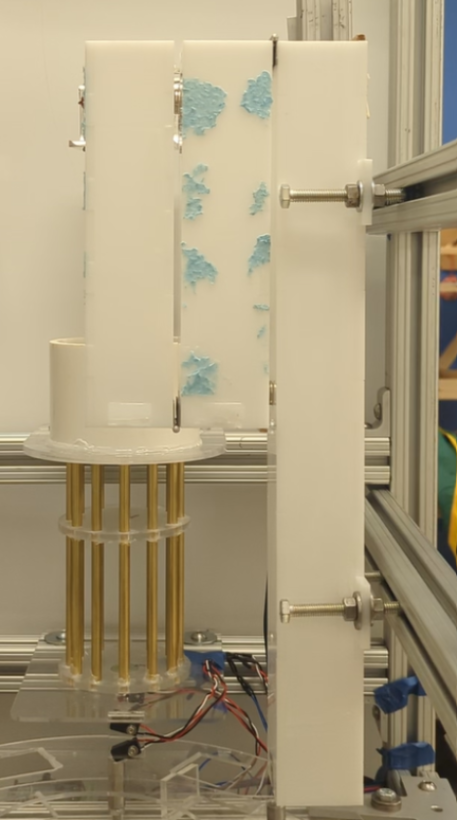
The pill filling system saw several design changes. First, the system was made out of laser cut acrylic, brass tubes, PVC, and plastic filament. A pill tank was created out of PVC tubing to house 450 pills. A custom 3D printed agitator was designed to sit inside this tank and ensure each pill tube was fully filled and to prevent overfilling when in motion. Support plates and bracing pieces were laser cut out of acrylic and hold 12 brass pill tubes. On the bottom of the system, a sensor detects when a bottle reaches the system which tells the Arduino to dump 30 pills into the bottle. When a bottle is not in the system, the assembly shakes back and forth to ensure pills are fed into the tubes.
Cap placement was iterated to be more reliable after repeated uses. Metal tongs were fashioned to both hold the cap in place and to push it flush onto the bottle as it moves. This passive system was a large success.
Cap tightening was reverted back to a passive design and uses a friction plate block, made out of machined aluminum with foam overlayed on the edge, and a plastic roof to apply a downwards pressure during tightening.
The rotary table was made out of laser cut acrylic which removed tolerancing errors on the bottle position. This vertical configuration allowed for a direct drive motor to be attached. The wiring for both motors are fed into a soldered breadboard, two stepper motor drives, and an Arduino Uno.




The code of the system controls the pill filling subsystem and the rotary table, the two major motion elements of the design. The system operates by first controlling the rotary and moving the bottles through the system until a bottle reaches the pill filling subsystem. The pill filling assembly at this point stops shaking, rotates to the next filled tube, and empties it after the bottle and pill tubes have been adjusted to the correct position. After a brief delay, the system resumes motion until the next bottle comes.



An example of each subsystem in action can be observed by the full system demonstration shown below. For more information on this project, please reach out!
